1.系统描述
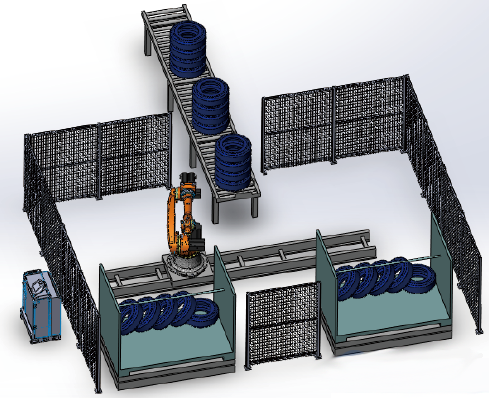
本系统使用一台SR50搬运机器人配合地装导轨来完成轮胎的自动化上下料工作。整个过程中机器始终在导轨上来回运动并通过高精度夹具实现高速及精确的轮胎抓放。
2.工艺流程
1)轮胎来料输送线末端将工件定位;
2)每次机器人从原点位置出发运动到轮胎来料输送线完成工件下料;
3)通过地装行走轴快速移动依次完成双工位旋转料台的工件上料;
4)等待托盘放满工件,叉车将工件运出至指定区域。
3.系统特性
1)系统安全、稳定;
2)使用地装行走轴来增大机器人的运动范围;
3)使用高精度、高稳定性机器人手抓来确保抓取工件的精度;
4)能适应尺寸规格相近的产品。
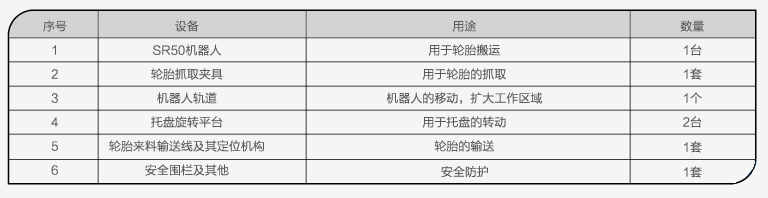
4.主要配置