1.系统描述
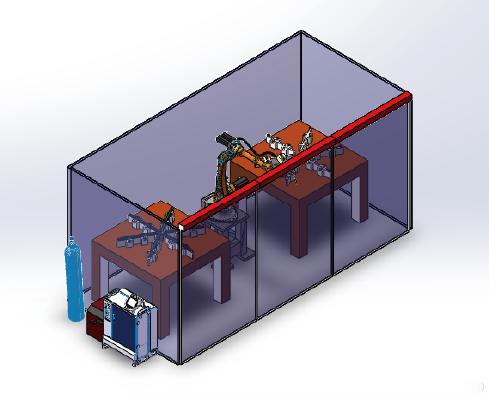
本系统为一台SA1400机器人完成双工位的焊接单元、人工上下料。借助定位装置和气动夹紧方式对产品实现定位后再实施机器人焊接。
2.工艺流程
1)机器人兼顾左右双工位
2)机器人对工位一焊接时,自动门1关闭,自动门2打开,工位二进行人工上下料,反之亦然。
3)对于需要机器人焊接的区域,规划出实际的焊接顺序,既要考虑如何控制焊接的变形(如:对称焊接可以减小变形),又要考虑尽量减少机器人的行走和变换位姿的时间
3.系统特性
1)系统安全稳定;
2)焊接牢固、焊接美观,质量稳定性高;
3)工件上料夹紧定位方便、准确;
4)能适应尺寸规格相近的产品(夹具能适应一定范围内多种规格的工件加工),而且夹具调整简单、方便。
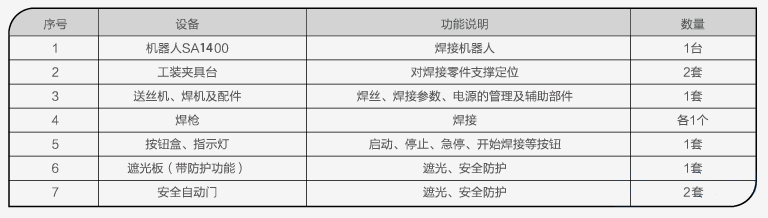
4.主要配置